电源
91篇文章
Mos管驱动有多种方式,有专用驱动芯片驱动,也有用其他的器件搭建的驱动,下面就讲解下目前比较流行的几种驱动方式。
最简单的方式就是电源管理芯片直接驱动,电源芯片都是有直接驱动MOS管的能力的,只是在应用这种驱动方式的时候,
1、需要去注意下我们芯片规格里面的Sink/Source Capability,不同的芯片对应的参数是不一样的。
2、了解下MOSFET的寄生电容,比如图上的Cgd,Cgs等,我们MOS管开通的时候就是在给Cgd,Cgs在充电,如果这两个电容的容值比较大的话,那么驱动的能力就需要加大,如果驱动能量不够可能导致MOS管驱动不开而增加损耗,一般对于小功率的电源用的MOS管电流不是很大,用芯片直接驱动是可以的,有些芯片在规格书里面指出芯片最大能做多W的电源。下面的电路是芯片通过电阻直接驱动,开通与关断的速度一样,
我们很多的时候为了让开通的速度变慢点,关断的速度变快点,这是因为关断的时候,电压一般要比开通的时候高,这的话关断的损耗要比开通时的损耗大,为了解决这一个问题,我可以通过吧关断速度减小,这样就可以减小关断速度。具体做法就是如下面的图。看下面的图,可以看到MOS管在开通的时候,有R1与R4限流,然后对MOS管电容充电,当关断的时候,R4的电阻上面的电压被钳位在0.7V(这里认为二极管的VF就是0.7V),大于0.7V后,电流充二极管上面流过,然后与R1串联放电,这样等减小了驱动电阻,让MOS管快速的关断,减小了关断损耗,这一个电路中,一般R1与R4的电阻参数的匹配,一般R1要小于R4,比如R1 是22Ω,R4是47Ω的参数,当然这一参数不是固定的,是可以改变,不同的MOS管的参数是不一样的。虽然加快了关断速度,但是这样一来的就要去电源芯片的驱动能力变大,有些芯片能力不够的可以通过增加PNP三极管来实现。
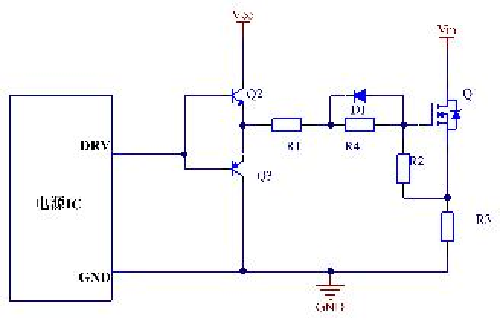
下面的图就是增加三极管的驱动电路,MOS开通的时候还是让芯片来直接驱动,关断的时候通过三极管来放电,让三极管工作在放电状态,让三极管的be电流来控制ec电流来泄放MOS管的栅极电容的电荷,ec的电流是通过be电流放大的,只要三极管的ce电流足够就可以了,这样的电源IC所需的关断能力就要小很多,解决了关断速度开的问题,同时也解决了IC驱动能力不足的问题。
解决了关断的能力,对于一些功率比较的的电源,里面的MOS管可能电流比较大,驱动电容非常的大,甚至出现多颗电源并联等,这个时候电源芯片可能直接驱动MOS管的能力就不够了,同时会出现芯片与MOS管距离比较远的现象,如果直接用芯片驱动,PCB上面的线感也比较大,那可以根据上面的关断的时候增加三极管来驱动MOS,在开通的时候也可以增加三极管来驱动MOS管,这样的芯片的驱动能就大大的减小了。如下图所示,就是我们的增加了两个三极管,这就是推挽电路也叫图腾柱电路。他有两大好处。
1、使芯片的驱动能量得到放大,可以同时驱动多个MOS管,都有足够的能量,把大部分驱动的功耗都分散到了图腾柱上面,让芯片的功耗减小了,避免芯片温度高的问题。
2、图腾柱电路可以在PCB画板的时候随意移动,这样的可以靠近MOS管,让MOS管的开通与关断的驱动电路上面的线感非常小,避免一些没有必要的误动作。
上面的几种电路MOS管与芯片都是共地的,有时候会出现不共地的时候,比如半桥的上管MOS管,这种不共地的MOS要驱动的时候,就会用到了隔离变压,对于隔离变压的应用很多时候是下面的电路,就是增加了隔离变压,同时增加了一个RC滤波电路,其中R1目的是抑制PCB板上寄生的电感与C1形成LC振荡,C1的目的是隔开直流,通过交流,同时也能防止磁芯饱和
前沿消隐(LEB)技术在开关电源电路中是一种非常重要的的电路,对于电流型的芯片大部分都会有前沿消隐电路,这一电路在反激中非常的常见,主要作用是保证电源芯片的稳定性,避免出现误判导致整个电源系统崩溃,下面以反激电路为列来讲解为什么需要前沿消隐。
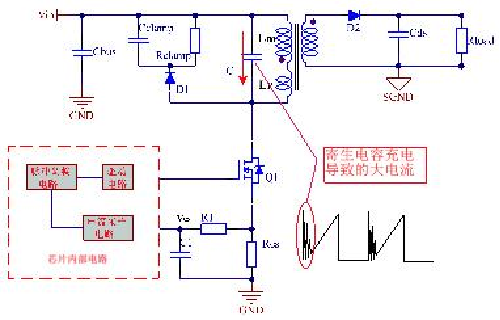
上面的反激电路图是一个电流型的控制芯片,电流型的芯片是通过电压环与电流环以前来控制MOS管的。芯片里面控制MOS关断是通过误差放电器的输出与CS脚电压经过比较器来比较而实现MOS管关断的,也就是当Rcs上面电压超过了误差放电器输出电压的时候,MOS管关断,这是芯片控制的基本逻辑。那Rcs上面的电压是反映了变压器里面电流的大小。如果是一个理想的变压器的,根据U=L*dI/dt 变压器里面的电流是线性增长的。当变压器里面的电流上升到一定值后去关断MOS管, 但是变压器是用导线绕在磁芯上面的,如果下图所示,一般我们变压器的原边的线圈比较多,而且会绕制多层,绕线与绕线之间是有匝间电容的,同时层与层之间也是有寄生电容这就导致了实际的变压器里面是有寄生电容C,而变压器的耦合是不能达到100%的耦合,所以同时也有漏感Lr。实际就是有寄生电容,同时有漏感,主电感,那就可以画出实际的变压器的电路模型来。
把实际的模型放到了电路中如下图,当MOS管关断的时候,寄生电容的两端电压是想等的,电容没有电,一旦MOS管导通,寄生电容一端接输入电压,另一端是接到地的,这时变压器的原边绕组上面的电流是为0A,电感的电流是不能突变的。而电容的电压是不能突变,但是电路是可以突变,这个时候电容是快速的充电,应为刚开机的时候电容上面的电压是为0V,那么所以的电压都是加在MOS管的内阻上面,这就是管子开通时就会有一个非常高的电流,这个电流有可能超过我们实际的电感上面的峰值电流,根据前面我们的电流采样电流知道,如果电流超过了误差放电器的输出电压,我们的电流检测脚就会给出管断MOS管的信号,而实际电感上面的电流是非常的小,这就会导致电源的整个系统出现问题,为了解决这一个问题。通过测试发现这一个尖峰时间是非常短的,一般是在200nS以内,为了把这一个尖峰消除,可以去加一个RC电路来消除这一个尖峰,就是下图中的R1与C1,那这一RC怎么去选取了,其实就是根据我们寄生电容导致的尖峰的频率的来取RC的截止频率,一般RC的截止频率的 3倍小于等于尖峰频率。RC的截止频率是1/(2πRC) 尖峰的频率一般是1/T 根据公式可以大概推出有简单的计算方式就是2RC≥200nS 如果R取1K C的取值>100pF 。
以前的芯片只能通过RC来消除,而随技术的发展,芯片公司在芯片里面把这一个尖峰做了处理。就是当驱动刚为高电平的时候,电流采样电路是不去检测电流,等过一段时间后才去检测电流,这样芯片里面就把刚开机的时候因为寄生电容导致的限流电阻上面的高电压给屏蔽了。这样的一个技术就是前沿消隐(LEB),这段时间就是前沿消隐时间,一般是200-300nS。有了前沿消隐的芯片可以不去加RC滤波电路。
下面图一是一个典型的降压电路,D1是续流二极管,当D1导通的时候,D1的正向压降是比较大的,如果输出是5V或者是3.3V的电压,那么对于D1上面占整个输出的压降是非常的明显,看二极管的规格书可以知道,如果需要把Vf值降低一倍,那么电流需要比原理的值小8-10倍,那么用二极管来整流的Vf引起的损耗是不可以避免的,为了解决Vf而引起的损耗,那么想到了用MOS管来替他二极管,因为当mos管导通的时候,压降就是电流乘导通内阻,一般MOS的内阻都非常的小,所以很多要求效率高,输出电压比较低电流比较大的电源,大部分都用同步整流来实现,那么对于图一用的二极管来续流的电路就叫异步整流,如果用MOS管来替代二极管的电路就加同步整流。
下面的图二是同步整流,续流二极管是被Qs给短路了,工作的原理是当Q1导通的时候,Qs关闭,这个时候输入电压是给电感储存能量,当Q1关断的时候,如果没有Qs,或者是Qs没有打开的时候,D1导通,如果Qs导通,那么就是短接了D1,因此Q1与Qs是不能同时导通的,如果同时导通了,会导致直通使输入源或者是输入电容Cin短路,这一定需要防止的。既然不能同时导通,那么Q1与Q2的导通需要有一个死区时间,这几是同步整流不能像二极管一样mos管关断,二极管被动导通,二极管是一个被动器件而mos管是一个主动器件,这就是同步整流需要有死区时间的原因。
下面需要注意的就是Qs的接法不能接反,因为MOS管体内是有体二极管的,如果接反了会导致直通,既然用MOS管来替代了D1,为什么还需要接D1了,这里是当Q1关断的时候,需要有一个死区时间,在这死区时间里面如果没有D1钳位,那么Qs的体内二极管会导通,但是Qs的体内二极管一般都是普通的二极管,正向压降比较大,导致损耗增加,还有在关断Qs的时候,Q1是还没有导通的,在死区时间里面体二极管会导通,而体二极管的反向恢复特性是比肖特基差的,所以保留D1肖特基二极管,当Q1关断,Qs没有导通的时候,D1会导通,D1的压降是比Qs的体二极管压降小很多,并且反向恢复特性非常的好,可以提高效率。但是D1是并在MOS管外面的,如果Layout的时候D1与Qs相差比较远的话,PCB线长可能有寄生电感,在高频下寄生电感表现出非常大的阻抗,这就会导致损耗增加,我们希望Layout的过程中D1尽量靠近Qs,最好是与Qs同一个芯片,这样最大限度的降低ESL,既然要减小MOS管与肖特基二极的距离,如果把MOS管的体二极管做出了肖特基的或者是把肖特基二极管集成到MOS管里面,这样一来减少了PCB的占地面积,减小电源的整体体积。同时解决了因ESL引起的问题,所以现在有很多的MOS管的体二极管的压降是非常低,可以直接应用于同步整流,不需要去单独并联二极管,如图三所以
同步buck电路里面Q1与Qs的驱动是不能有共通的,所以加有死区时间,形成了互补型同步Buck,对于这样的Buck电路工作在CCM模式是没有什么问题的,但是如果Buck工作在DCM的时候,同步Buck的效率可能就要比异步Buck的效率低,这是为什么了?我们看下面的波形。
我们看在连续模式的时候,当下管关断的时候,电感上还是有电流,同步Buck关断与异步Buck关断时差不多,同步Buck的导通的损耗是要小的,但是如果是工作在断续的模式,当电感电流为0的时候,异步Buck的二极管会实现了零电流关断,就没有反向恢复的问题,而同步Buck就不一样了,因为电感电流为0的时候,mos管的驱动还是有的,所以mos的电流会由D流向S,这样电感电流也是反向流,使得输出的电容通过电感与下管mos管放电,这样一来损耗增加,当下管关断的时候,MOS管有一个关断损耗,又因为有死区时间的存在,那么电感上的电流是不能突变,所以电感电流继续流向了上管的二极管,当上管打开的时候实现了零电压开通,但是buck的上管的压一般不是很大,对于效率的影响不是很大,从上面分析来说,越是轻载说明同步buck的效率越低。
首先我来了解为什么要有均流电路,设计电源时都是有要求输出电流范围与输出电压,功率一般是给定的,但是不同应用场合对于功率的要求是不同的,如大型的通讯系统电源可能需要几百个千瓦,如果我设计成一个电源,所应用的器件的应力都非常大,为了减小器件的应力,可以采样分布式的办法有就是多个电源并联来做,比如10个10KW的电源就可以做到了100KW。做10KW电源要比100KW要容易的多。所以就需要应用到并联,电压源并联就需要均流技术,大家想为什么需要均流,比如我们都是5v输出的电源直接并起来不就好了吗,理论是可以的,但是我们实际中的开关电源总是有误差范围的,比如5V电源可能是5.01V也可能是4.99V,这都是在我们的允许范围之内的。如果是一个5.V的与5.01V电源并联,可能导致的5.01V的电源输出带载过功率,而5V的电源输出在轻载,这是我们所不想看到的,我们希望是两个电源带载是一样才是最好的,为什么会出现一个过载一个是轻载了,这是因为我们的开关电源是有反馈系统的,当两个电源并联的时候,5V的与5.01V直接并联在一起,我们看下面的图,
当电源模块1与电源模块2输出相同然后并联接到负载RL上面的时候,因为有线阻R1与R2,如果线阻不一样导致的输出电流也会不一样,如果是R1与R2的电阻相同,而Vo1小于Vo2,有可能会导致Vo1一直是空载。两个电源模块电压不一样的原因有可能是Vr1与Vr2两个参考电压的误差导致,如果是这两个参考电压导致的输出电压不样的时候,当并联的时候,输出电压小的模块的输出电压被强制钳位到了负载上面的电压,只有当负载上面Vo2-I2*R2电压小于Vo1的时候,模块1才会有电流流向负载。
那采样什么样的办法才能让电源模块均流,如果我们想一办法让模块2的输出电压变低,
或者是让模块1的电压变高是不是就可以实现了模块2少带载,模块1多带载。
于是就有了下面的4种均方法。
一:输出阻抗法
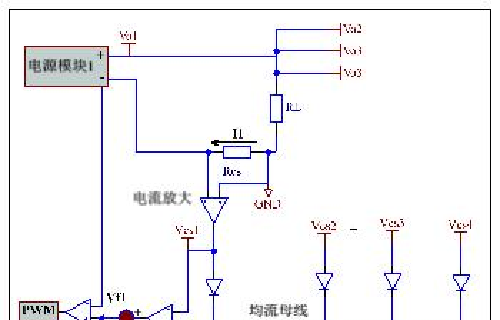
如图2所示当一个模块电流比较大时候,经过电流环放大后与电压环的Vf脚进行叠加,原来输出电压高的模块因为带载重,输出电流大,电流环的输出电压变大,导致Vf脚电压变高,因为我们的电源是负反馈,所以经过整个系统调节后实现了输出电压变低,这就是输出阻抗放,电路简单,但是输出电流大了,电压就下降导致输出电压的精度变差。
二:主从设置法:
主从设置法就是人为设置一个主模块,所有模块以该模块为参考,输出电流,一个主从设置均流法的工作示意图三
从上图可以看出,在这种工作方式就是用多个电源模块单元并联在一起,其中一个电源模块工作在电压源方式,这一个电源为主模块,其余从模块单元工作于电流源方式。实际上是由电压环(外环)和电流环(内环)构成电流控制型的双环控制,或说成是电压控制的电流源。这种均流方式主模块是我们设计过程中指定的,如果工作过程中主模块发生问题,那么整套系统将瘫痪。
三:平均电流法:
平均电流法首先要得到一个平均电流值,也就是总负载电流除以模块总数得到的电流值,各模块电流与该平均电流比较,如果模块电流大于平均电流就调低模块输出电压,反之调高模块输出电压,从而实现各模块输出电流一致。在平均电流法中,将所有模块的输出电流,通过一个电阻接到一起,就可以得到所有模块输出电流的平均值,这个点我们称之为均流母线,如果模块电源小于输出的时候均流母线电压的时候,通过误差放电器放大后,与参考电压叠加后,把输出电压抬高,让输出电流变大。
四:峰值电流法
这是一种自动设定主模块与从模块的方法,即在n模块并联的时候输出最大的电流模块将自动成为主模块,而其余模块为从模块,那么电压的模块会的电流依次被调整,以校正负载电流的不均匀,
这种方法又被叫成自动主从法,那实现的方法是我们把均流的母线电阻变成了二极管,这样输出电流最的大一个模块就会变成了主模块,其他模块都向主模块靠拢。
我们在做反激的电源的时候占空比都是在0.5一下,可以说是每一个做反激的工程师达成的共识了,但是对于为什么D<0.5,可能大部分工程师都不清楚,一个笼统的说法是会引起次谐振荡,需要加谐波补偿,但是其具体原因究竟是什么了,
首先我们市面上面大部分的反激芯片的控制方式都是电流型的,这样做的好处是可以逐周期控制整个电源,过功率或是过流的时候能很好的保护整个电源系统。
那么对与一个电流型的芯片控制是一个什么样的了,看下面的图,它有电压环做外环,电流环做内环控制,电压环是通过输出电压与参考电压进行比较后经过误差放电器然后在与变压器的电流进行比较,这就是电流型的控制芯片。
因为是电流型的控制方式,那么当限流电阻上面的电压超过了Vcom电压的时候,MOS管关断,整个电源都是工作在稳定状态的时候,输入电压与输出电压不变,那么变压器上面的电流上升斜率与下降斜率都是一样,为此当整个电源工作在DCM模式的时候,如果限流电阻上面出现了扰动电流的时候,DCM的会提前出现关断,下一个周期还是会从原来的电流位置开始。
按照下一个周期又是从零开始的原则,如果扰动持续在,那么整个系统会去调控占空比来实现整个系统的平衡,这样看来DCM是不会出现次谐波振荡的。
下面我来看CCM模式
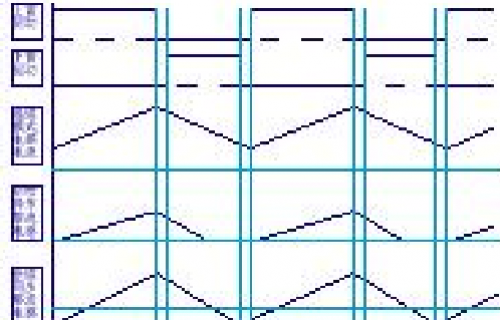
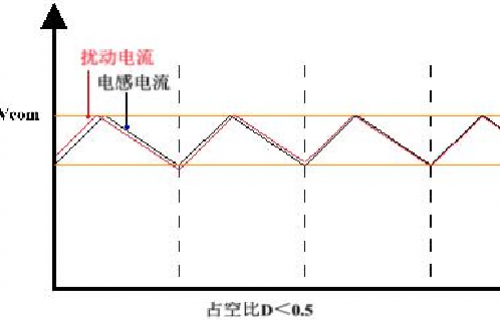
首先来看占空比小于0.5的时候的波形,看下面的图,变压器上面的电流上升斜率有下降斜率不变,当扰动波形出现的时候,再瞬态的时候,Vcom的电压是不变的,随时间的推移,扰动的量是越来越小,
从上面的波形来看的话,整个系统是收敛的。
接下来我们看下连续模式下面占空比大于0.5的时候出现一个什么样的现象,
看下面的图,随时间的推移,整个扰动出现了放大的,并没像我们的小于0.5的时候一样整个系统收敛的,而是出现了放大的状态,为此出现了整个系统会出大小波,也就是我们常说的次谐振荡,这也是为什么我们的反激大部分占空比设计到了0.5以下,
根据上面的的几个波形,次谐振荡出现的条件可以总结为一下几点:
1、必须是电流型的控制芯片,
2、工作在是连续模式下面
3、占空比一定要大于0.5的时候
以上三个条件缺一个都不会出现次谐振荡,如果出现了磁芯振荡的时候,可以通过加谐波补偿来消除次谐振荡。
 姜维
姜维