电源
91篇文章
大家好,我们今天继续物联网开发板硬件电路设计相关的探讨。
电源和单片机最小外围电路都设计完成了以后,按照我们的规划,剩下还有两个模块需要去考虑,一个是继电器控制电路,一个是温湿度检测模块。
继电器是一个开关型器件,而且是一个隔离型的开关器件。开关器件相对来说比较好理解,我们可以通过控制触点的开通和管断,来实现开关的效果。就比如继电器开通的时候,相应的模块就可以工作了,因为通上电了么;继电器关断的时候,那么模块就不工作了。因为我们的开发板是联网的,我们是不是就可以实现远程对设备进行操作呀。
为什么说继电器是隔离型的开关器件呢?一个最直观的感受,就是原副边可以不站在一个地上是吧,也就是说原副边可以没有任何电气上的连接。继电器工作原理,大家估计都比较熟悉了。原边线圈通上电之后,就变成了电磁铁。既然是电磁铁,那么就会有吸引力,有了吸引力,弹片就会被吸附。按照下面的示意图来看,受控电气就会开始工作。
大家看一下,原边和副边之间是不是完全没有电气上的连接。两边发生关系的渠道其实就是电磁力。这个东西有点像光耦,光耦的原副边发生关系是原边的光信号,是吧。继电器和光偶一个比较大的区别是继电器的副边可以通大电流,因为整体的阻抗小,所以一般用于大功率器件。但是光耦就不同了,它本质上还是流控型的半导体器件,所以通不了大功率,一般是当做开关信号来使用。
明白了继电器的工作原理,我们来选择一个常用的继电器,看看该如何设计它的驱动电路。我们看一款松乐的继电器的线圈规格,它的线圈功耗有两种,一个是0.6W,一个是0.8W。
相比之下,0.8W的吸附力相对强一些,继电器的工作也会更稳定。为什么这么说呢?大家看一下,如果继电器线圈使用得是+5V电压驱动,0.6W的时候,流过线圈的电流是120mA,但是0.8W的时候,这个电路有160mA。流过线圈的电流大,电磁铁的吸附力也就更强;电磁铁的吸附力更强,接触电阻也就更小,副边通大电流的时候就更加稳定。
我们这里以0.6W,12V线圈来举例,这个时候,流过线圈的电流是不是有50mA。那么继电器的驱动电路该如何设计呢?首先这个肯定是一个开关,所谓的开关就是导通的时候阻抗无穷小,断开的时候阻抗无穷大。再一个这个开关应该是一个受控开关,而且受控信号应该是从单片机发出来的。单片机发出来的信号肯定是非常微弱的。那么结合上述两点,这个开关应该是一个电子开关。我们熟悉的电子开关,主要有两个,一个是三极管,一个是MOS管。三极管和MOS管的一个主要区别是MOS管导通的Rdson更低,可以通过更大的电流。但是整体上相对来说,价格更高一些。我们这里使用三极管就够了,一般三极管Ice可以轻松达到100mA。三级饱和导通的时候,Vce是0.3V,这样三极管的功耗才有0.03W,SOT23封装的三极管可以轻松搞定。
思路理顺了之后,我们来看一下驱动电路是如何进行设计的。
T1这个三极管就是我们刚才提到的开关管,M点连接到单片机的引脚,当M点的电位为高的时候,三极管T1就开通了,饱和导通的时候T1的Rce很小,那么从+12V这条回路的内阻完全有继电器来决定,从规格书上可以看出来,这个内阻在240R,那么流过继电器的电流是12V/240R = 50mA,也就达到了我们的设计目的。D4这个管子起到什么作用呢?它主要是续流的时候,起作用。继电器在关断的时候,内部的线圈必须有续流回路。如果没有续流回路,就会产生严重的dv/dt,也就是线圈两端会产生尖峰电压,可能就会把三极管的CE端击穿。整体上也就是说,电感的能量是以电流来维持的,电流是必须要有回路才能存在。不管怎么说,能量都是不可以突变的。我们就得想办法给继电器的电感提供一个续流回路。最上面的两个电容,大电容主要是稳压的作用,相等于能量资源池,进一步降低了电源端的阻抗;小电容,主要是滤波作用。这个是电容的基本工作原理。
分析完了继电器的驱动电路,我们来看一下温湿度检测的电路设计,温湿度检测这块,我们使用的是SHT20这块芯片,这个芯片大概的样子如下图所示。
这个芯片内部有一个I2C的通信模块,单片机和这个芯片之间可以通过I2C协议进行通信。关于I2C通信的协议,大家可以自己去搜索一下,它就是一个同步通信协议,和SPI类似。只不过它的寻址是靠地址码来实现的,SPI通信模块,则是通过片选线来实现的。具体指令类型,可以参见它的datasheet说明。
如果我们自己用GPIO口来模拟I2C通信时序,一定要严格按照它的通信要求来,这里一个是命令格式,一个是通信速率相关的设定,比如通信的频率最高是400Khz,SCL和SDA的高是多长时间等等,这些都要符合规定,这样才能通信成功。
我们以湿度测量来举例,看看它的通信过程是一个什么样子的。SCL时钟信号时钟由主机控制,SDA绿实线为主机发送数据,SDA绿虚线为从机发送数据。具体的操作说明,可以从截图中就看出来,我这里就不再进一步解释了。
第一步,发送湿度测量指令。
第二步,读取测量到的温湿度数据。
因为这个模块完全是数字接口,内部的温度检测部分的模拟电路,我们也不用管,所以实现起来相对比较简单。我们又不需要进行芯片设计,只是去使用它,所以考虑问题也不需要那么复杂。但是I2C协议的实现是建立在开关器件是开漏输出的前提下的,所以SCL和SDA这两条线都需要上拉电阻。
关于物联网开发板原理图的设计,我们就先到这里。
大家好,我是张飞实战电子张角老师!
从今天起,我们开始分析运放uA741的内部结构,争取把它的工作原理给大家讲清楚,讲透彻。只有知道了运放的内部结构,我们才真正可能看得清楚运放的一些参数,在运放选型的时候,才会更加有的放矢。
虽然较新设计的运算放大器在几乎所有可能的方面(速度、噪音、电压范围等等)都超过了它,但最初的741仍然广受喜爱,并在今天依然大量使用。我们对运放的学习,不能仅仅止步于外围电路的搭建,那样对运放的了解不可能深刻。我想通过这一系列的文章,争取能够把uA741这款运放的工作原理给大家讲解得尽可能透彻,让大家在学习运放的时候,能够更加深入,少走一些弯路。
与设计外围电路不同,电流源在运放内部更加常用。比如恒流源、镜像电流源、Widlar电流源、增强型镜像电流源等等。为什么会出现这样的情况呢?其中最为主要的原因,就是运放需要放大的是差分信号,那么这里就遇到一个问题:如何把电压差转化为一个差值信号。运放内部目前选择的方案,就是把电压差转化为电流差。那么要产生这个电流差信号,就需要恒流源,其实这里类似一个加法。两个电流之和是一个恒流,那么一个电流大了,肯定另一个电流就小了。有了这个电流差之后,运放内部的电路再把这个差值信号转化一个电压差信号,然后通过这个电压差信号驱动中间级的放大电路。中间级的放大电路现在一般采用达林顿管来实现,这样放大倍数就会很大了,假定每一级的放大倍数是200倍,那么达林顿管总体的放大倍数就会有200*200 = 40000倍。实现了信号放大以后,输出级需要解决的就是功率输出的问题了。毕竟运放是一个模拟器件,它需要一定的带载能力,一般情况下,输出级主要是使用推挽电路来做的。当然因为受制于封装的原因,这个电流值也不能太大,所以这里还有保护电路存在(限流作用)。
整体上运放的工作原理,就如上面所示,741也不例外。
大家最常见到的电流源,估计就是电流镜或者说叫做镜像电流源源了。它常见的拓扑结构如下图所示。这个电路的目的,就是实现Io电路和Iref几乎是相同的。这样的话,如果我们要想获得一个特定的电流Io,那么我们只需要去设定Iref就可以了,也就是说Iref侧进行电流的设定,在Io侧实现电流的输出。而下面这个电路,就像镜子一样,可以实现电流的映射。
这个镜像电流源的工作原理,大体如下。因为T1和T2是在同一个晶圆上刻出来的,所以它们具有较高的对称性。T1和T2的引脚是连接在一起的,所以它们对地的电位是相同的。因为对地的电位是相同的,所以它们的基极电流也是相同的。我们说这两个管子是在同一块晶圆上雕刻出来的,那么它们的放大倍数是也是近似相同的。那么当两个管子都是处于放大状态的时候,他们的Ic电流也就是相同,也就是Ic1 = Io。
那么到了此时,我们只是实现了Ic1和Io的镜像关系。但是我们设计的目的其实是Io=Iref,是吧,那么也就是说这里存在一定的误差。这个误差值是多少呢,是不是Ibf是吧。按照上图画下来,Ibf = 2*Ib,对吧。如果T1、T2这两个运放的放大倍数比较大,我们假定100倍好吧,那么Ibf带来的误差是不是差不多在1/50左右呀。这个误差,是不是可以近似忽略呀,所以我们可以在总体上认为Io就等于Iref。上面提到的就是镜像电流源的工作原理。
我们明白了镜像电流工作原理之后,要想产生我们需要的电流,比如10uA。按照我们上面的思路,那么第一个工作,是不是要指定Iref。但是这里面临一个问题,就是这个10uA的电流,如果使用电阻限流的方式来搞,那么就需要非常大的电阻。我们假定供电电压是20V,电流是10uA,那么差不多需要2MR的电阻,这个电阻值太大了。电阻值太大了,芯片在封装的时候,就会面临体积上的问题:电阻越大,某种程度上意味着体积越大。这对芯片设计是非常不利的,所以我们面临一个问题,就是如何使用更小的电阻去产生一个较小的电流呢?
在运放内部,实现这个功能的,就是Widlar电流源。我们也可以把它理解成在镜像电流源上的改进版。这个电流源的拓扑如下图所示。
我这里先给大家分析一下,这个电路的工作原理。本质上,这里是通过R2上电阻的分压,减少了Vbe2的电压值。T1和T2这里都是处于放大状态,Vbe2的电压值变小了,那么那么流经BE PN节的电流值也就变小了,进而放大之后的电流值Ic也就变小了。那么这样的话,即使Iref这边有很大的电流,Io那边的电流也不会很大,这样就解决了R1电阻太大不好封装的问题。具体的公式推导如上图所示,Is是二极管的反向饱和电流,UT=k*T/q,是一个常数。但是这个电流源也有一定的问题,大家看一下公式中存在UT这个常数,但是UT是容易受到温度影响的,所以Io自然也就容易受到温度影响。如果,我们对电流的值要求很精密,这个电流源可能就满足不了要求了。
解决了Iref电流值设定的问题之后,我们基本上解决了运放中电流源设计的主要障碍。但是我们说运放放大部分和功率部分的最好都踩在地上,我们才好进行电路设计是吧。实际上,大家如果常看运放内部的结构图的话,经常会发现恒流源的符号,但是这个符号经常是挂在源端的。比如像LM324这个片子,它内部的恒流源符号很多。关于图中的恒流源是怎么做的,可能会有一些疑问,毕竟这块的电路图,很少有厂商会画出来。
那么也就是说,我们希望的是不是一个P管做的恒流源,不是N管的对吧。一般P管做的恒流源放在源端,N管做的恒流源放在地端是吧。其实P管的恒流源和N管的恒流源思路是一样的
那么如图所示,Iref是不是就可以映射到Io上去了呀,这样这个电流源是不是就可以为后面的负载所用了,对吧。但是741使用的并不是这样的方案,它使用的是一个电流反馈的思路,本质上应该是一样的。我们下一篇文章,继续分析741运放的电流源的部分。
大家好,我是张飞实战电子的张角老师。我目前正在做的一个项目是开发一块基于RISC-V架构单片机的鸿蒙系统开发板。
鸿蒙系统是华为公司开发的新一代物联网操作系统系统,RISC-V单片机是不同于ARM架构的单片机,目前形势一片大好。在美国对我国芯片以及操作系统等高新科技的疯狂打压的背景下,鸿蒙系统以及RISC-V架构单片机这两种产品的发展以及突破显得尤其重要。它们两个很大概率上会是电子信息领域我们突破美国技术封锁的两个突破口。
张飞实战电子,愿意在力所能及的情况下,为这两块产品的推广添砖加瓦,贡献自己的力量。为此,我们愿意把这块基于RISC-V架构单片机的鸿蒙系统开发板的实现过程,尽可能清楚的展现给大家,争取越详细越好,为大家以后进行相关的产品开发提供一些经验参考。
这块开发板使用的单片机是深圳睿思芯科的Pygmy-E系列的单片机,这是一款32位的面向IOT领域的单片机,具备超低功耗的特性以及丰富的外设接口。
开发板的硬件电路模块包括电源电路,电平转换电路,单片机最小电路,USB转SPI电路,USB转UART电路,温湿度检测电路,片外SPI Flash电路,红外模块检测电路,开关检测电路,蜂鸣器电路,流水灯电路。
电源电路包括12V电源接口电路,12V转5V Buck电路,5V转3V3 Buck电路,3V3 转1V8 LDO电路,3V3转0V9 buck电路,3V3转0V 8 buck电路。BUCK电源和LDO电源是我们做开发板的过程中非常常用的电源,在这个模块,我将和大家分享下BUCK以及LDO电路的设计方法。
电平转换电路主要是利用双向电平转换芯片TXS0104以及TXB0104等实现电平的双向转换。为什么我们需要电平转换芯片呢,主要是因为我们使用的这块单片机是还处于验证阶段,单片机IO的电平是1V8,而我们常用器件的电平以3V3的居多,比如我们用的FT4222 USB转SPI芯片,SHT20温湿度检测传感器等。
单片机最最小外围电路包括供电模块,晶振模块,复位电路模块,BOOT启动模块等。
其他模块电路我们就不一一介绍了,等以后我们再展开分析。
软件这块,我们打算依据硬件电路开发一些demo。这些demo主要分为三个板块,一个是睿思芯科RISCV单片机的外围驱动开发模块,主要包括GPIO、UART、I2C、SPI等接口的驱动开发;一个是鸿蒙系统Liteos-M模块的内核实验;再一个就是,利用外围电路我们我们要演示的一些demo,比如流水灯,蜂鸣器唱歌,红外信号检测,温湿度检测,外置SPI Flash读取等。
软件的开发和编译是在Ubuntu 中进行的,会使用到一些简单的Linux命令。这里我们会尽可能详细的介绍清楚编译环境的搭建,以及调试过程。
整个项目涉及到的硬件、软件等相关的东西比较庞杂,我们争取尽可能清晰完整地展现所有的细节。因此估计更新的时间会比较长,期待大家能够和我一起坚持到最后。久久为功,方能修成正果。一起加油!
电源是开发板能量的来源,一个稳定可靠的电源系统是开发板能够正常工作的先决条件。我们这个开发板电源系统相对来说比较复杂,主要是因为这个开发板上出现的电压种类比较多,而且个别器件对电压的精确度有非常高的要求。
关于各个模块对电压的要求,我这边做一个简要的说明。
首先开发板电源的输入是12V的DC输入;第二,像红外、FT4222HQ、数码管等器件,需要5V的工作电压;第三,W25Q128FVSG存储、温湿度传感器等器件,需要的工作电压是3V3;第四,单片机IO输出的电平是1.8V;第五,这个芯片引脚内部有不少接口的工作电压是0V8;第六,对于芯片的锁相环,需要输入的电压是0V9。从0V8和0V9这两个电压幅值就可以看出来,这个板子对电源电压幅值的精确度是比较高的。
下图是我们开发板上的电源模块,可以直观地看出这个开发板的电源模块还是相对复杂的。
下面我分别介绍一下各个电源模块的设计要点。
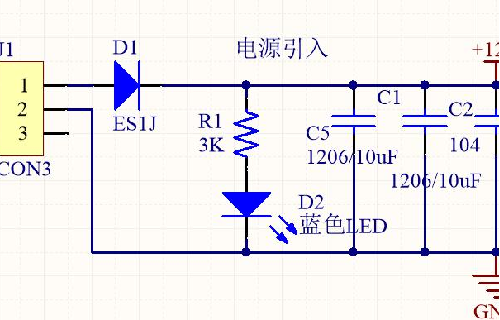
首先是12V的电源输入模块。
这个模块电路的设计要点,是D1这个二极管。这个二极管主要的作用其实是防止电源反接。当然这个二极管上的压降是越小越好。这个蓝色的LED主要是提供了人机交互的功能,当它发光的时候,可以提醒你已经上电了,你下面所有的操作都是带电操作。
上图是一个12V转5V的buck电路,输出是5V的直流电源。这个buck电路使用的是SY8113这款芯片实现的,关于这个片子详细的信息大家可以下载下来看一看。这个电路设计的要点,一个是电感的选择,一个是布局。电感的选择尽量是让电感工作在连续模式,电路布局的时候高频大电流的回路尽可能短,越短越好。这样干扰会越来越小,输出的电源也会更加平稳。这里高频电路有两个,一个是从电感到电容,然后再回到芯片内部地的大电流回路,绿色的那条;另外一个是那条红色的回路,输出电压的反馈回路,这条是信号回路。在电路布局的时候,两个电路按理说都是高频的,都应该最短。但是他们毕竟有冲突,芯片周边的空间就只有那么大,这个时候,我们只能优先考虑大电流的。
上图是5V转3V3的buck电路,主要的关注点和上面提到的差不多。只是这里我们把Buck芯片换成了SY8077。另外一个需要注意的是,电压反馈电阻的选择。SY8077 FB引脚上的电压0.6V,如何选择R29和R30是要注意的,在满足电压配比的前提下,尽量选择常用的电阻。还有一个要注意的是,这里的电阻要选择1%精度的。
3V3转1V8的电源,我们使用的是一个线性电源,使用的芯片是RT9065GE。这个地方不涉及到高频信号,布局上相对来说也相对简单,这里就不多说了。为什么这个地方,会使用线性电源,而不是BUCK电源呢,主要还是3V3到1V8的之间的压差比较小,相对来说功率损耗比较低。
上面两个电路是3V3产生0V8和0V9的电路,两个电路本质上没有太大区别,分压电路的选择上不太一样。其实这里不使用Buck电路也是可以的,毕竟单片机的功耗不是太大。相对难点还是分压电阻的选择这块,如何能够使用常用的电阻进行准确的电压配比。
关于开发板电源的简介,我们就先到这里。
在开关电源中,有一个相对不容易解释清楚,但是对整个系统的稳定性又起到重要作用的知识点-斜坡补偿。我们打算后面用一系列文章来深入探讨一下这方面的知识,争取让大家能够对这块内容有相对深入的理解。
我们首先需要回答的问题,就是开关电源系统为什么需要斜坡补偿,或者说斜坡补偿解决了哪方面的问题?从宏观上看,开关电源的调节系统可以分为两部分,一个是内环电流环,一个是外环电压环。之所以把电流环称之为内环,主要是因为它的调节速度更快,属于单周期调节。电压环,调节速度相对电流环肯定是更慢的,对于输出滤波电容来说,电压是电流的积分。电流环调节的结果要经过数十个周期之后,才能在电压信号上做出反应。
当系统的输出电流或者说电感电流,因为负载变化或者输入电压变化产生扰动的时候,在电压环起到调节作用之前,有可能发生电感电流的次谐波震荡,或者说是电感电流的振铃现象。
这里之所以说是有可能,主要是因为这个现象发生在CCM模式下,而且占空比大于50%的时候。当占空比小于50%的时候,扰动电流的震荡会自动趋于收敛。我们下面用图形化的方式给大家演示一下。
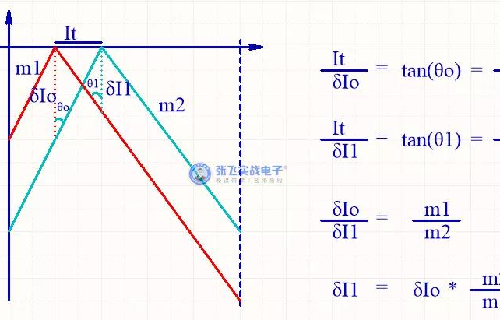
上图是占空比小于50%的时候,负载变化引起的电流扰动。大家可以看一下,这个扰动在几个周期后,会自动收敛。具体为什么会收敛呢?我们可以推算一下电流扰动量的变化公式。
大家可以看一下,当占空比小于50%的时候,Ton的时间内电流上升的斜率大于Toff时间内电流下降的斜率。那么这个电流抖动量的变化趋势和这两个斜率的比值很有关系。
具体的推导公式,如上图所示。我们这里是分两个三角形来进行计算的。在θ0的三角形内,根据正切关系可以得到δIo和It(两个三角形的公共部分)比例关系式①。实际上这个正切关系本质上是不是就是斜率呀。同样的,在θ1这个三角形内,我们也可以得到式子②。这两个式子化简以后,就会得到关系式③。大家可以看一下,δI1是不是要比δIo要小呀,因为m2小于m1,对吧。当占空比小于50%的时候,是不是m2一定小于m1呀。那么经过几个周期的迭代,是不是扰动量慢慢变小后,系统也就收敛了。
但是当占空比大于50%的时候,也就是m2大于m1的时候,这个扰动量是不是也来越大,结果也就会出现电感电流的震荡,如下图所示。
对于控制系统的开关芯片而言,Ton的时间也就会出现波动,也就是会出现所谓的大小波交替现象的发生。这个波动的电流对系统的稳定性是无益的,需要想办法解决掉。那么该怎么解决呢?这个也就是斜坡补偿的由来:既然这种情况下m2大于m1,我们能不能通过斜坡补偿的方式使得整体的斜率大小关系发生改变呢?
下篇文章,将会对这个问题进行更深入的分析。
 张角
张角