电源
91篇文章

大家好,我是张飞实战电子黄忠老师,今日分享GPIO结合寄存器以及硬件电路,再来举例子分析输入输出。
通过寄存器的位标注rw,我们可知这个寄存器的某个位是可读(r)并且可写的(w),我们也可以通过读寄存器里面的值得到引脚的配置信息,如果寄存器的位标注只有r或者w,那么就代表这个寄存器的这个位只能进行读(r)或者写(w)。
复位后IO口寄存器的值每一位可能不都是一样的,也就是说复位后IO口的状态、工作模式等不完全相同,一定要注意。
模式配置寄存器GPIOx_MODER,右上角用蓝色圆圈标识的地方告诉我们IO口的复位值,可以看到复位后对于A组IO口来说初始值0XA8000000,对于B组IO口初始值为0x00000280,其他组IO口都是0。该寄存器共 32 位,每 2个位控制 1个IO。
如图中左下角划蓝线的为第0位和第1位。通过往第0位写0,第1位写0配置成Input Mode(输入模式),通过往第0位写0,第1位写1配置成General purpose output Mode(普通输出模式),通过往第0位写1,第1位写0配置成Alternate function Mode(复用功能模式),通过往第0位写1,第1位写1配置成Analog Mode(模拟模式)。
例如我们要把这个寄存器第0位写1,其他都写0,表示如下:
GPIOA->MODER |= 0x00000001;
这就相当于把A组的PA0口配置成了普通输出模式,其他IO口配置成了输入模式。
GPIOx_OTYPER寄存器用于控制 IO 的输出类型,仅用于输出模式,在输入模式下不起作用。该寄存器低 16 位(第0位-第15位)有效,每一个位控制一个 IO 口,根据往不同的位写1(开漏输出)/写0(推挽输出)来配置成不同的输出模式。复位后,该寄存器值均为 0,即默认为推挽输出。
例如我们往A组IO口的第0位写1那就将PA0成开漏输出模式:
GPIOA->OTYPER |= 0x00000001;
GPIOx_OSPEEDR寄存器用于控制 IO的输出速度,仅用于输出模式,在输入模式下不起作用。该寄存器每 2 个位控制一个 IO 口,根据往不同的位写1/清0不同的位来配置成不同的模式。复位后对于A口来说初始值为0X0C000000,对于B口初始值0x000000C0,其他口都是0。
例如我们往A组IO口的第0位和第1位写1那就将PA0成高速输出模式:
GPIOA->OSPEEDR |= 0x00000003;
GPIOx_PUPDR寄存器用于控制 IO 的上拉/下拉,该寄存器每 2 个位控制一个 IO 口, 用于设置上下拉,根据往不同的位写1/清0不同的位来配置成不同的模式。复位后对于A口来说初始值为0X64000000,对于B口初始值0x00000100,其他口都0x0C000000。
例如我们往A组IO口的第0位写1那就将PA0下拉模式:
GPIOA->PUPDR |= 0x00000001;
GPIOx_ODR寄存器是IO口的输出数据寄存器,寄存器低 16 位(第0位-第15位)有效,寄存器每 1 个位控制一个 IO 口, 也就是这个里面位的状态代表了单片机输出的状态,根据往不同的位写1/清0不同的位来配置成不同的模式。复位后都是0。
例如我们往A组IO口的第0位写1那PA0就输出高:
GPIOA->0DR |= 0x00000001;
对于一些其他的寄存器大家可以去参考数据手册,按照上面讲述的方法去配置。
硬件设计:
图示LED灯部分我们用到了B组的2PIN(脚的简称)和4PIN, C组的15PIN, D组的8PIN, E组的8PIN和9PIN。
LED灯硬件的设计决定了LED灯的驱动方法,LED灯相当于一个发光二极管,如果单片机引脚输出高,则二极管的左边和右边电压相同,不亮,反之单片机输出低,右边电压大于左边电压通过单片机内部电路形成回路点亮二极管,那麽通过控制引脚输出的高低就控制了LED灯的亮灭。
软件设计:
下面就通过实际的寄存器来配置IO口模块,下面为LED寄存器配置代码:
void Init_GPIO(void)
{
//开启IO时钟
/**********************LED*****************************/
RCC->AHBENR |= (1<<18); //I/O port C clock enabled
RCC->AHBENR |= (1<<19); //I/O port D clock enabled
RCC->AHBENR |= (1<<20); //I/O port B clock enabled
RCC->AHBENR |= (1<<17); //I/O port A clock enabled
RCC->AHBENR |= (1<<21); //I/O port E clock enabled
GPIOB->MODER = 0; //Reset register
GPIOB->OSPEEDR = 0;//Reset register
GPIOB->PUPDR = 0;//Reset register
//GPIOB_Pin2 GPIOB_Pin4
GPIOB->MODER |= 0x00000110; //设置GPIOB_Pin2/Pin4输出模式
GPIOB->OSPEEDR |= 0x00000330;//设置GPIOB_Pin2/Pin4输出速度
GPIOB->ODR |= 0x0014; //设置GPIOB_Pin2/Pin4输出高电平
//GPIOE_Pin8 GPIOE_Pin9
GPIOE->MODER |= 0x00050000; //设置GPIOE_Pin8/Pin9输出模式
GPIOE->OSPEEDR |= 0x000F0000; //设置GPIOE_Pin8/Pin9输出速度
GPIOE->ODR |= 0x0300; //设置GPIOE_Pin8/Pin9输出高电平
//GPIOD_Pin8
GPIOD->MODER |= 0x00010000; //设置GPIOD_Pin8输出模式
GPIOD->OSPEEDR |= 0x00030000; //设置GPIOD_Pin8输出速度
GPIOD->ODR |= 0x0100; //设置GPIOD_Pin8输出高电平
//GPIOC_Pin15
GPIOC->MODER |= 0x40000000; //设置GPIOC_Pin15输出模式
GPIOC->OSPEEDR |= 0xC0000000; //设置GPIOC_Pin15输出速度
GPIOC->ODR |= 0x8000; //设置GPIOC_Pin15输出高电平
}
上面没有配置的寄存器我们使用默认值,通过改变输出数据寄存器(ODR)的值,控制某一个引脚输出高和低控制LED灯的状态。
例如:控制IO输出高电平:
GPIOD->ODR |= 0x0100; //设置GPIOD_Pin8输出高电平
控制IO输出低电平:
GPIOD->ODR &= 0xFEFF; //设置GPIOD_Pin8输出低电平
在这里我们仅配置IO口的推挽高速输出,不上拉,不下拉模式作为演示,大家也可以根据上面介绍的方法去配置调试其他模式,GPIO部分设计实现介绍就在此结束,若有不理解的欢迎交流~
大家好,我是张飞实战黄忠老师,今天我们来分享STM32单片机的自举BOOT模式。
当你拿到项目的线路板,打开电脑,噼里啪啦一阵子,撸了一段代码出来,往单片机里面一下载,纳尼?突然发现烧录器掉线了,怎么整都连接不上了,这个时候整个人心情都不好了,别慌,恢复心情,你需要用到下面这个高端大气上档次的技术,首先说明一下我们本次文章参考芯片以SMT32F103C8T6来做说明,其他芯片同理,话不多说,我们开整。
首先我来简单阐述一下这种方法的原理,这种方法是利用了STM32单片机的“自举BOOT模式”,首先使单片机处于系统BOOT模式,也就是让单片机启动的时候从System memory启动,然后在PC机操作上位机软件通过串口发送控制命令擦除芯片中存储的程序。
1.首先我们要知道第一个信息,有的单片机有很多个串口,那到底是从哪一个串口来发送这个命令呢?我们从数据手册的“存储器和总线架构”章节(2.4启动配置小节)获取如下信息,可以得出可以使用USART1接口启动自举程序。具体要发送什么命令,可以参考AN2606手册,我已经通过这个手册提炼出指令信息,编写成一个上位机小工具。
2. 那么如何进入系统自举模式呢?从下图画红线处可以得出信息,想要进入系统自举模式,需配置BOOT0引脚为1(高电平),BOOT1引脚为0(低电平),然后复位单片机,那么在SYSCLK的第4个时钟上升沿会锁定BOOT引脚状态,并选择启动模式为系统存储器,即系统自举模式。
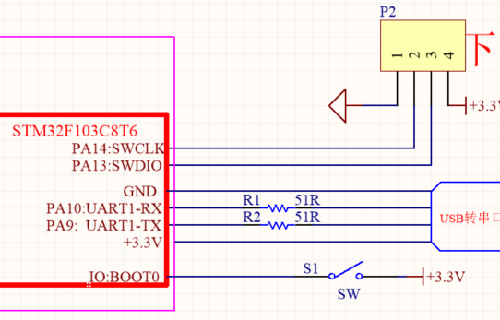
3. 接下来我们看看接线图,我画出了简单的示意图如下,各位看官,请结合下图看具体操作方法:
图3
1).把USB转换工具按照图示方法连接(注意全过程不需要使用烧录器,且此步操作后目标板已经带电,如果目标板3.3V功耗很大,需要给目标板用外部电源供电)。
2).在设备管理器中查看此转换工具对应的串口号(注意如果没有识别到串口,需要安 装驱动。)识别到的结果如下图4所示:
3).设置BOOT0引脚为高电平,BOOT1引脚为低电平(如果有的MCU没有BOOT1引脚可以忽略),并复位单片机(可以通过单片机复位引脚来复位单片机),使单片机处于自举BOOT模式。
4).在上位机小工具中选择对应的COM串口号,点击打开串口
5).点击擦除按钮
6).在小工具的中间窗口处会显示擦除成功
经过上面的6步擦除成功后,把目标板恢复至初始状态,即可继续正常使用了。(注意在连接不上之前,需先检查烧录器和MCU的接线是否接好)。
如果需要上述小工具的,可以在公众号中添加客服二维码,备注领取串口小工具,来索取。
大家好,我是张飞实战电子黄忠老师,今天我们来讲解下图解边沿对齐,中心对齐PWM...
在说边沿对齐,中心对齐前,我们先来段铺垫,PWM又称脉冲宽度调制,我们通过调节脉冲的占空比,我们可以控制电压的大小(比如我们满占空比时电压为12V,我们可以通过调节占空比让电压变为7V、5V甚至变为0V,实现输出电压可控)。
调节占空比后,输出电压怎么就变化了呢?可以用等效面积法来解释,例如在1ms周期里,满占空比时输出电压为12V,50%占空比时(即高低电平各占时间为0.5ms)高电平在整个周期的面积只有原来的1/2了,此时输出电压就等效为12*1/2=6V,那么通过调节不同的占空比,也就实现了输出电压调节。如图:
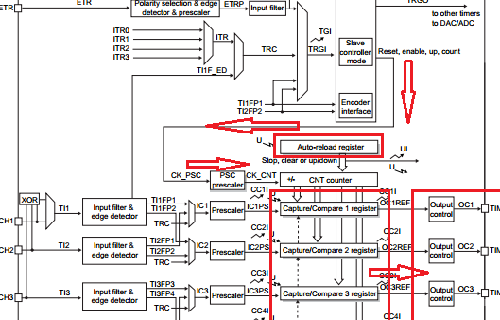
那STM32中是怎么生成PWM波的呢?时钟是芯片的心脏,没有时钟,芯片就是一块“废物”,有了时钟,芯片才能有条不紊的工作,那时钟跟我们要讲的PWM有什么关系呢?请看下图,STM32内部的定时器框图,看看它是如何生成PWM的。
方框内部的CNT Counter计数器会根据输入的时钟沿跳变来进行递加/减,时钟的频率决定了计数器递加/减的频率,这个计数器的值同时会和Auto-reload register(控制周期)、Capture/Compare x register(控制占空比)进行比较,当与控制占空比的寄存器值发生匹配时则控制输出引脚TIMx_CHx发生电平反转,当与控制周期寄存器值发生匹配时,周期结束,引脚电平置位,再次重复如上动作,就在引脚上输出了变化不同的电平,这个就是我们需要的PWM。
这个定时器模块可以根据软件编程设置出不同的PWM模式,定时器内部CNT Counter可被编程为向上、向下、向上向下运行,我们说的边沿对齐,和中心对齐就要从这个计数方式上切入,下面我们先来看三种不同的计数方式。
1.当CNT被设置为向上计数时,计数器从0递增向上计数到自动重载值(Auto-reload register),然后计数器又回到0,重新开始。
2.当CNT被设置向下计数时,计数器从自动重载值递减向下计数,计数到0,计数器又回到重载值,重新开始。
3.当CNT被设置向上向下计数时,计数器从0递增向上计数到自动重载值,然后计数器从自动重载值递减向下计数,计数到0然后又开始递增向上计数。
那这三种模式和2种PWM又是什么关系呢?PWM是怎么从引脚上输出的呢?请看下图:
1.向上/下计数模式PWM生成(只展示出了向上计数,向下计数同理):
2.向上向下计数模式PWM生成:
上文中提到的向上计数/向下计数,这两种生成PWM的方式,我们通常称为边沿对齐PWM;既向上又向下这种生成PWM的方式,我们称为中心对齐PWM。当然,发生匹配的时候引脚电平如何变化,是变高还是变低,这个可以通过软件编程来设置。
通过PWM调节输出电压,比如可以控制做呼吸灯,也可以实现电机的调速,不同的调速算法,会用到不同的PWM等等。
在C语言关键字中const举足轻重,我们今天就深度聊一聊const的定义和实际应用,让它不再是迷。
C语言中const关键字是constant的缩写,是恒定不变的意思。通常翻译为常量、常数等,我们一看到const关键字马上就想到了常量。这是不精确的,精确来说应该是只读变量,其值在编译时不能被使用,因为编译器在编译时不知道其存储的内容。那么const推出的初始目的正是为了取代预编译指令,消除它的缺点,同时继承它的优点。
事实上在C语言中const功能很强大,它可以修饰变量、数组、指针、函数参数等。
1、const 修饰的只读变量:
C语言中采用const修饰变量,功能是对变量声明为只读特性,并保护变量值以防被修改。
例如:
const int Max = 100;
int Array[Max];
这个大家可以在Visual C++6.0创建一个.c文件测试一下,你会发现在.c文件中编译器会提示出错。我们知道定义一个数组必须指定其元素的个数,这也从侧面证实在C语言中const修饰的Max仍然是变量,只不过是只读属性罢了。
还有值得注意的是,定义变量的同时,必须初始化,并且不能再重新赋值。
2、节省空间,避免不必要的内存分配,同时提高效率
编译器通常不为普通const只读变量分配存储空间,而是将他们保存在符号表中,这使得它成为一个编译期间的值,没有了存储与读内存的操作,使得它的效率也很高。
例如:
#define M 3 //宏常量
const int N= 5; //此时并未将N放入内存中
int i = N; //此时为N分配内存,以后不再分配
int I = M; //预编译期间进行宏替换,分配内存
int j = N; //没有内存分配
int J = M; //再进行宏替换,又一次分配内存
const定义的只读变量从汇编的角度来看,只是给出了对应的内存地址,而不是像#define一样给出的是立即数。所以,const定义的只读变量在程序运行过程中只有一份备份(因为它是全局的只读变量,存放在静态区),而#define定义的宏常量在内存中有若干个备份。#define宏是在预编译阶段进行替换,而const修饰的只读变量是在编译的时候确定其值。#define宏没有类型,而const修饰的只读变量具有特定的类型。
3、修饰一般变量
一般变量是指简单类型的只读变量。这种只读变量在定义时,修饰符const可以用在类型说明符前,也可以用在类型说明符后,例如:
int const i = 2; 或 const int i = 2;
4、 修饰数组
C语言中const还可以修饰数组,举例如下:
const int array[5] = {1,2,3,4,5};
array[0] = array[0]+1; //错误
数组元素与变量类似,具有只读属性,不能被更改;一旦更改,如程序将会报错。
5、 修饰指针
C语言中const修饰指针要特别注意,共有两种形式,一种是用来限定指向空间的值不能修改;另一种是限定指针不可更改。举例说明如下:
Const离谁近修饰谁的原则,
例如:
const int * p1; //定义1,p1可变,p1指向的对象不可变
int * const p2; //定义2,p2不可变,p2指向的对象可变
上面定义了两个指针p1和p2。
在定义1中const限定的是*p1,即其指向空间的值不可改变,若改变其指向空间的值如*p1=20,则程序会报错;但p1的值是可以改变的,对p1重新赋值如p1=&k是没有任何问题的。
在定义2中const限定的是指针p2,若改变p2的值如p2=&k,程序将会报错;但*p2,即其所指向空间的值可以改变,如*p2=80是没有问题的,程序正常执行。
6、修饰函数参数
const修饰符也可以修饰函数的参数,当不希望这个参数值在函数体内被意外改变时使用。所限定的函数参数可以是普通变量,也可以是指针变量。举例如下:
void fun1(const int i)
{
其它语句
……
i++; //对i的值进行了修改,程序报错
其它语句
}
告诉编译器i在函数体中不能改变,从而防止了使用者的一些无意或者错误的修改。
void fun2(const int *p)
{
其它语句
……
(*p)++; //对p指向空间的值进行了修改,程序报错
其它语句
}
7、修饰函数的返回值
Const修饰符也可以修饰函数的返回值,返回值不可被改变。
Const int Fun(void);
到这里const的定义和常用的说明我给大家做了描述,有疑问和其他想法欢迎交流~
大家好,我是张飞实战电子黄忠老师,今天我们学习ADC参考电压。
工程中大家经常会用到ADC来采集模拟电压,把模拟量变为数字量进行系统处理,有时候看到采集结果,什么?这个结果跟实际采集的信号怎么还有点小差距?那么就有可能是参考电压的问题。
参考电压有多重要,我们得要弄清楚它在ADC转换中扮演一个什么样的角色,弄清楚这个问题,我们需要从ADC的转换原理入手,一般单片机里面ADC模块使用的是逐次逼近型转换,也就是通过这种方法原理把模拟量转换为数字量,那什么是逐次逼近呢?
我们先来说一个生活中的案例,我们用天平称一个物体的重量,过程是这样的:从最重的砝码开始试放,与被称物体行进比较,若物体重于砝码,该砝码保留,否则移去。再加上第二个次重砝码,看物体的重量是否大于砝码的重量决定第二个砝码是留下还是移去。照此一直加砝码,到最小一个砝码为止。将所有留下的砝码重量相加,就得到物体的重量。
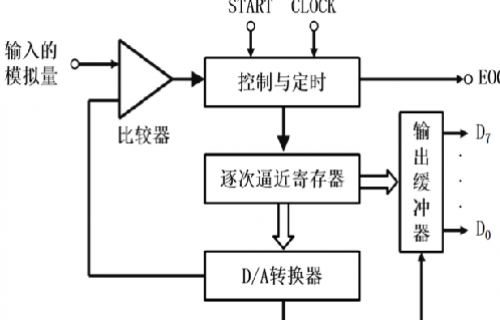
逐次逼近原理和上面的原理相同,下面我们看逐次逼近型ADC的原理,请看图:
上图是一个8位逐次逼近型ADC的框图,“输入的模拟量”是输入电压信号,“START”用来控制ADC启动转换,“CLOCK”是ADC模块的输入时钟,“EOC”是ADC转换结束信号,“OE”是ADC转换结果输出允许信号,“VREF”是参考电压。
随着时钟信号的输入,启动信号的开始,控制模块会逐次控制逐次比较寄存器产生不同的数据,数据产生后会送给D/A转换器,D/A转换器会依据参考电压,把这个数字量转化为模拟量送给比较器,比较器比较D/A转换器送出来的模拟量和输入模拟量的大小,产生的结果给控制单元电路,控制单元电路根据上一次的结果再次控制产生不同的数据,让D/A变成模拟量,再去比较,以此这样循环,每次比较,比较器会得出一个结果高或者低,根据这个结果决定当前产生的数字量是大了还是小了,一次一次的比较,找到那个和输入模拟量最接近的数字量,最后把这个数字量控制送到输出缓冲器,并且控制送出EOC输出转换完成信号,这就是一个大致的逐次逼近工作原理。
关于具体是怎么控制比较的,这个过程我们就不再展开,我有一个免费的视频是专门解析这个过程的,链接是(https://www.bilibili.com/video/BV1xV411s7J4/);从上面的描述中,我们抓住一个重点是:D/A转换器会依据参考电,把生成的数字量变为模拟量,在转换的时候必须需要有一个参考电压,这个电压就是我们AD模块的参考电压,那么大家试想,如果参考电压都不稳定的话,转出来的模拟量是不是也不会稳定,那么和输入模拟量比较的时候,比较的结果也就可能会发生偏差,造成错误的比较结果。
那怎么来保证这个参考电压比较稳定呢?1.我们可以在参考电压引脚附近就近放置电容(一大一小,大的储能,小的滤波);2.可以在参考电源前端串一个小电感再加电容。如图所示,这两种方法比较常见,也比较便宜,大家可以参考.
总结,ADC的参考电压是非常重要的,所以参考电压精确度不容忽略,要尽可能地使参考电压稳定,不受干扰。
这个知识我们就分享到这里,你理解了吗?
 黄忠
黄忠