电源
91篇文章
我们用滞回比较器,双阈值设计的PWM发生器,前面的课程我们简单的学习了它的工作原理,现在我们再比较详细的分析,学习。
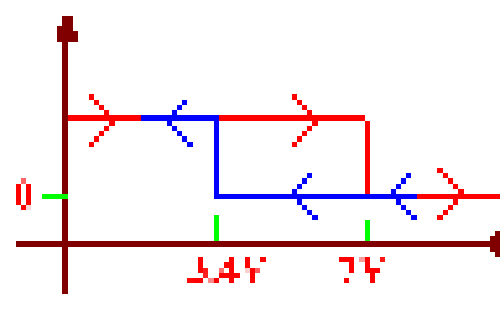
当C20的电压比较低时,假设是0V,此时C20电容开始充电,此时比较器输出高电平,充到3.4v时比较器输出电平不会翻转的,只有当充到7v时,比较器电平才会翻转为低电平,如上图红色电平翻转波形。
当C20开始放电时,说明C20的电压比较高,假设是12V,比较器输出低,电容电压处于高位开始放电,放到7v时电平不会翻转,只有放到3.4v时,比较器信号才会翻转,比较器输出高电平,如上图蓝色电平翻转波形。
当比较器输出高时,电容开始充电。充电阻抗R充=R18和R14串联再与//R12,最后与R22串联。回路如下图:
充电回路
当比较器输出低时,电容开始放电,放电阻抗是R22,放电回路如下图,通过比较器内部OC三极管放电。
(参数调试ok)
比较器输出高时,计算高阈值V1, 比较器输出低时,计算低阈值V2
大家好,我是张飞实战电子的郭嘉老师,今天要和大家讲一下纯硬件实现可调占空比的PWM发生器
我们要设计出可以调整的占空比,不影响频率,也就是说频率和占空比互不影响,而且像芯片一样还可以实现限制最大占空比
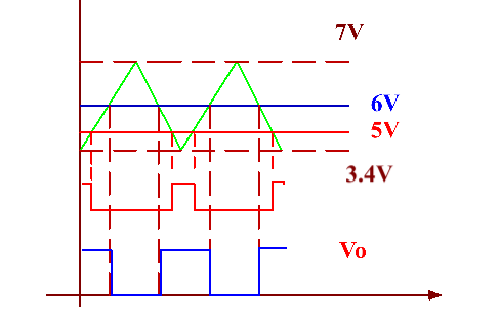
再加一级比较器我们看一下,怎么实现占空比调节。比较器的6脚与电容C20相连接,波形与C20上的波形一致,是三角波。 比较器5脚与滑动变阻器和电阻分压相连,通过调整滑动变阻器可以调5脚的电位。
假设我调整滑动变阻器把5脚电位调到6v,此时与6脚的三角波相比较,得出比较器的波形,及占空比。得到输出波形如蓝色所示,6v和VO.
假设我调整滑动变阻器把5脚电位调到5v,此时与6脚的三角波相比较,得出比较器的波形,及占空比。得到输出波形如红色所示,5v和VO.
通过滑动变阻器可以调整占空比。也就是5脚电平越低占空比越小。
刚上电的瞬间,会出现5脚一直电位大于6脚电位,比较器输出100%占空比。如果此时负载节NMOS,此时mos就直通了,功耗会非常大,很容易坏掉。 就像开车一样,一脚油门瞬间冲出去了,对人或对车都有很大的冲击,或者会造成一定的伤害。
所以5脚这里我们要改善一下,刚上电瞬间让5脚电位上升的慢点,等等6脚的电位,因为6脚与C20相连了,所及会上升的慢点,电容两端的电压是不能突变的。
所以5脚这里我们加个积分电容。让5脚上升的慢点。至少让6脚电位升到3.4v及以上
这样可以实现软启动,即5脚电压慢慢往上升省,比较器输出占空比慢慢加大。
如图6脚电位升到3.4v以上了,此时5脚电位上升到如3.4v、3.5v、5v和6v,比较器输出PWM占空比慢慢变大。
上面是上电的瞬间。
我们再看一下掉电的瞬间,可能会出现比较器的5脚大于6脚的情况,此时比较器输出PWM占空比就是100%了。我们怎么改善?
如突然掉电时,比较器5脚C14掉电快点,怎么实现呢?
我们加个P管Q5实现给C14自放电,当突然掉电时,即使三极管Ib很小,但是Ic可以达到βIb,β一般100,具体要看手册。这样就实现了掉电时,C14快速放电。防止比较器输出100%占空比。
这个可以调PWM占空比的 PWM发生器我们就完成了。即使没有单片机的,我们用纯硬件的也可以设计PWM发生器。
大家好!我是张飞实战电子的郭嘉老师,这篇文章聊一聊新能源汽车旋转变压器驱动电路讲解。
图(1) 旋变器的缓冲驱动电路
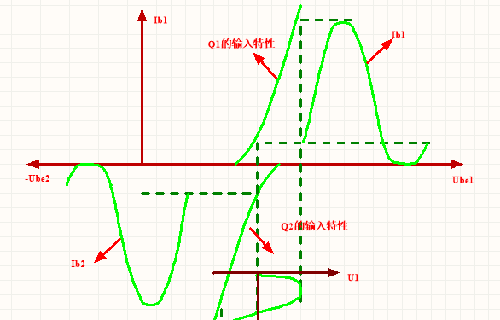
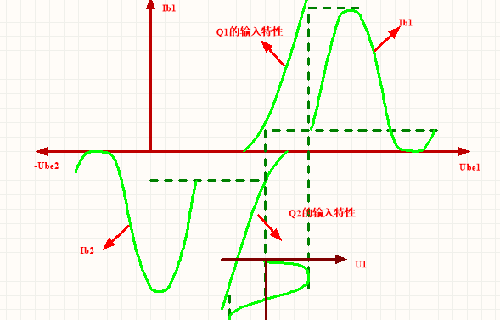
Q1和Q2管在Ui的作用下,其输入特性的中的图解分析如图3所示:
图(2) 输入特性的中的图解分析
综上所述,输入信号的正半周主要是Q1管发射极驱动负载,正负半周主要是Q2管发射极驱动负载,而且两管的导通时间都比输入信号的半个周期要长,即在输入电压很小的时候,两只管子同时导通,因而他们工作在甲乙类状态。
值得注意的是,若静态工作点失调,例如R6、D1、D2、R7中的任意一个元器件虚焊,则从VCC+12V经过R5、Q1管的发射结,Q2的发射结到R8到GND形成一条通路,有较大的基极电流Ib1和Ib2流过,从而导致Q1和Q2有很大的集电极电流Ic1和Ic2,且每只管子的管压降VCE都约等于VCC+12V,以至于Q1和Q2管可能因为功耗过大而损坏。因此,常在输出回路中接入熔断器以保护功放管和负载。
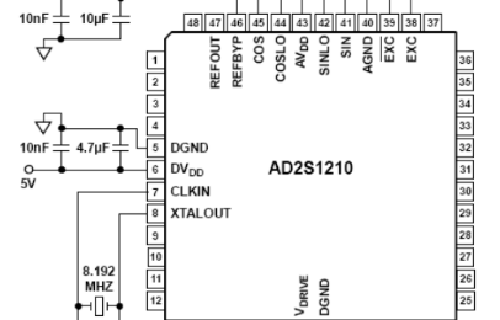
RDC 与旋转传感器配合使用,以便检测电机轴的位置和转速。在这种应用中,旋变器利用正弦波参考信号进行激励。初级绕组上的旋变器激励参考信号被转换为两个正弦差分输出信号:正弦和余弦。正弦和余弦信号的幅度取决于实际的旋变器位置、旋变器转换比和激励信号幅度。RDC 同步采样两个输入信号,以便向数字引擎(即所谓 Type II跟踪环路)提供数字化数据。Type II 跟踪环路负责计算位置和速度。典型应用电路如图 4 所示。
图(3) 旋变解码芯片AD2S1210的典型电路
由于旋变器的输入信号要求,激励缓冲器必须提供高达 200mA 的单端电流。图 1 所示的缓冲电路不仅提供电流驱动能力,而且提供 AD2S1210 激励输出信号的增益。本电路说明性能要求及推荐的激励缓冲拓扑结构,典型旋变器的输入电阻在100 Ω 至 200 Ω 之间,初级线圈应利用 7 V rms 的电压驱动。该旋变解码芯片支持 3.15 V p-p ±27%范围的输入信号。AD2S1210的额定频率范围为 2 kHz 至 20 kHz。采用 Type II 跟踪环路跟踪输入信号,并将正弦和余弦输入端的信息转换为输入角度和速度所对应的数字量。该器件的额定最大跟踪速率为 3,125rps。
大家好!我是张飞实战电子的郭嘉老师,这篇文章聊一聊新能源汽车旋转变压器驱动电路讲解。
图(1) 旋变器的缓冲驱动电路
Q1和Q2管在Ui的作用下,其输入特性的中的图解分析如图3所示:
图(2) 输入特性的中的图解分析
图(3) 旋变解码芯片AD2S1210的典型电路
AD2S1210 采用 5 V 电源供电,输出缓冲电路要求 12 V 电源(图1所示),以便向旋变器提供所需的差分信号幅度。
图(1)部分图:缓冲驱动电路
图 1 所示为 AD2S1210、AD8662 和相关电路的原理图,其中包括一个推挽输出级,它能够向旋变器提供所需的电源。本电路的优势之一是当不存在信号时,输出晶体管只需要少量静态电流。AD2S1210 的激励输出通常在EXC和/EXC输出端提供 3.6 Vp-p正弦信号,这将产生一个 7.2 V p-p差分信号。汽车旋变器的典型转换比为 0.286。因此,如果将一个单位增益缓冲器配合 AD2S1210 使用,则旋变器输出的幅度约为差分2 V p-p。这种信号的幅度不足以满足 AD2S1210 的输入幅度要求。理想情况下,正弦和余弦输入应具有差分 3.15 V p-p 的幅度,因此缓冲器级应提供约 1.5 的增益。
图 1 所示激励缓冲器的增益通过电阻 R1 和 R2 设置。在电路测试期间,R1 和 R2 电阻的值分别为 10 kΩ 和 15.4 kΩ,对应的增益为 1.54。电阻 R3 和 R4 设置放大器的共模电压 VCM(2) = +3.75 V。激励输出的共模电压 VCM(1) = +2.5 V(中间电源电压),差分电压VPP(1)=3.6V。因此,缓冲器输出共模电压 VCM(OUT)约为+5.7 V(+12 V 电源的大约一半),VPP(out)=5.54V。
2.2 kΩ 电阻为推挽电路输入端的二极管 D1、D2 提供偏置电流,并确立该侧的静态电流。D1 和 Q1 上的电压(VBE)应保持一致,D2 和 Q2 上的电压(VBE)应保持一致。3.3 Ω 电阻和 4.7 Ω 电阻上的电压也应保持一致。选择运算放大器 AD8662 是为了满足推挽输出级的驱动要求。旋变器和 RDC 转换器往往用于恶劣环境中,因此一般需要能够在扩展温度范围(−40°C 至+125°C)工作的器件。该运放应提供 2 MHz 以上的带宽,输入失调电压应小于 1 mV。注意不得在 0 V 附近向信号引入失真,因为该失真可能无法被旋变器本身滤除。确保无失真的方法是设置输出晶体管的偏置,使得过零时仍然有足够的电流来维持线性。
大家好!我是张飞实战电子的郭嘉老师,这篇文章接着聊一聊新能源汽车旋转变压器驱动电路讲解。
OCL电路的的输出功率及效率
功率放大电路最重要的技术指标是电路的最大输出功率Pom及效率η ( 伊塔)。为了求解Pom,需首先求出负载上能够得到的最大输出电压幅值。当输入电压足够大,且有不产生饱和失真时,电路的分析如图3.2所示。
图中的I区为Q1的输出特性,II区为Q2的输出特性。因两只管子的静态电流很小,所以可以认为静态工作点在横轴上,如上图所标注的,因而最大输出电压幅值等于电源电压减去晶体管的饱和压降,即(Vcc-Vces1)。
实际上,即使不画出图形,也能得到同样的结论。可以想象,在正旋波的正半周,Ui从0逐渐增大,输出电压也随之逐渐增大,Q1管的管压降必然逐渐减小,当管压降下降到饱和压降时,输出电压达到最大值,其值为(Vcc-Vces1),因此最大不失真输出电压的有效值:
最大输出功率:Pom=Uom^2/R2=(Vcc-Vces)^2/2RL
在忽略基极回路电流的情况下,电源Vcc提供的电流:
Ic=(Vcc-Vces)/RLsinwt
电源在负载获得最大交流功率时,所消耗的的平均功率等于平均电流于电源电压之积,
整理后得到,转换效率
η.=Pom/Pv=Π/4*(Vcc-Vces)/Vcc
在理想情况下,即饱和管的压降可忽略不计的情况下
Pom=Uom^2/RL=Vcc^2/2RL
Pv=2/Π*Vcc^2/RL
η.=Pom/Pv=Π/4=78.5%
应当指出,大功率饱和管压降为2-3v,因而一般情况下不能忽略饱和管的压降,即不能用上面的三个式子。
用于AD2S1210 RDC参考信号输出的高电流缓冲器(图1)
图(2)消除交越失真的OCL电路
图(3.1) 输入特性的中的图解分析
 郭嘉
郭嘉